

�\���c���M�\Ͳ�}�Ѓ����Һλ�y������
���_��GWR�����������}�_���_���w�Еr�g��TOF�����g������ͨ�^�y����������̖�l������ĕr�g��z�yˮƽ���IJ��ϱ��淴��y���������x����
�y�������ݼ{ɢ�b���w��Ͳ�}ˮƽ���D1�����ܕ���������TOF�b��ʹ�û��ڳ�ϵ�y�в����ܶȵķ��䣬��������_ҺλӋ���ϵĽ�늳�����DC���ķ��䡣�ܶȻ�DC-�Լ����bλ�ã�Ͳ�}�ĸ߶��Լ��T��֧�Σ���������҉m�������ȸɔ_�Ĵ��� - �Q����ÿ�N���õ��^���x��
�D1�����_ҺλӋ�dz��m�Ϝy���ݼ{���w�w���ĸ�Ͳ�}�е�ˮƽ��
���_ҺλӋ
GWRʹ�ô�s1.2 GHz�}�_���_��̖�������U���D2������|������ʹ��ɞ�“���|”�b��; Ҳ�����f���U����|���|���w����늽��|����늽��|׃���r������������ذl�������՚��ֱ��늉���1.0���ֹ��w늉�����1.4�����l�������r�g�pȥ���Ϸ��ؕr�g2��Ȼ����Թ��ف�Ӌ��ˮƽ�����y���ϵ�DC���y���������@��Ӱ푡�

�D2�����_��һ������U����|�����_��̖��������
���ϵ�DCԽ�ͣ���������Խ�٣��Ķ��pС�˜y����������DC�ܵ��Ҹɔ_�ܶ࣬����ڴ����҉m�r��GWR���g������һ���ܺõ��x��GWR���g�c���_֮�g���u�����^�w�Y��Ч�ʡ�
����̖��GWR�l�����l��r������������������С��݆��; �������ɗU���K�������ġ��S���^С��ռ����e���º�����������������Ч�ʣ��p���c���ֻ�҉m������á�Ȼ�������_��̖��һ���ǶȰl��������ռ����e���ӣ����ҷ��صķ��䲻���������ذl�������ڱ��^��̖��ݔ�c���b���}�r��GWR����Ч��
���������x��
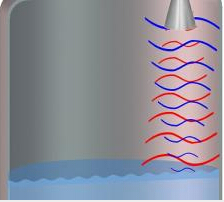
�������������D3��ʹ�É�늾��w�a���Cе�}�_���Ă�����Ĥ�l�䡣���ڿ՚�ͽ��|֮�g���ܶ�׃����ԓ�����^�̽��|�ı��淴�䡣Ȼ���ڂ�����Ĥ̎���շ�����}�_�������}�_���ز����İl�ͺͽ���֮�g��TOFֱ�ӌ����ڂ������ͽ��|����֮�g�ľ��x��

�D3��������������Ͳ�}�еĹ��w����l�����}�_�����y��������̖���w�Еr�g�Դ_��ˮƽ��
�����^ȥ������������Ć��}��һЩ�Ñ��h�x���������������ǣ�����Ԅ����坍���ܵij�������������������������Ĺ��ϡ�
ͨ�^�O�y������Ĥ�ϵ���̖���ȣ�ͨ�^���������z�y�҉m�����Y���۷e��ԓ�b�ÿ��Ԅ����Ӊ�늾��w���l�ʣ��a�����坍Ч�������_��������Ĥ����������e����ɵ�����Ӱ푡��˹������Sʹ�ó������o�迼�]������e�ۡ�
���ڂ������ijߴ������^С�������������dz��m�ϰ��b�ڪMխ�ĵط������ҿ����x������ֱ�Ӱ��b��Ͳ�}��픲���
������Ҫ�^С��������0.1Ӣ����ܫ@�ÿɿ��ķ��䡣����Ҫ�~��ăȲ�Һλ�_�P - �����ӱÿ��� - ��ô�����������^�̓r���c���^���x��
������h���ضȺ͝�ȶ�˥�p��������Ͳ�}���v��Ĝض�׃���͘O���������������������������ô�������ܲ����^���x�����_���ܚ����^�ضȻ�՚���ˮ�ֻ�������Ӱ푣�������@Щ��͵đ����������Ժܺõع�����
�}�_��FMCW���_
�x����IEEEҎ�����l���\�С�C���ν���4��8 GHz֮�g����˴�����x���Ĺ����l�ʞ�6GHz; K���ν���18��27 GHz֮�g��������x��ʹ��26 GHz; ��W���ν���75��110 GHz֮�g����˴�����x��ʹ��26GHz��ʹ���@Щ�l���е�ÿһ�� - �Լ��Εr�ε�ʹ������ - �����L�����Ƕȷdz��ض���
�l��ԽС�����LԽ�L�����磬�҂�����ͨ�^���F ���F�ǣ���������a��һ���L���L�ĵ��l���Դ��F�⡣���L�^С���^���l�ʲ��ܴ��F�����_��λ�y��Ҳ����ˡ����l���_ - ���粨�L�^�L��6 GHz - �ȶ̲��L��26 GHz�܉���õش��҉m��������
�D4�����w�Еr�g���_ҺλӋ�У�ͨ�^�y������̖��ݔ������ͷ��x������ĕr�g���_���ƽ
�_��ʹ���Ă��l�ʣ����L�Ͳ�����ȡ�Q��Ͳ�}�еėl��������������
��FMCW���_�У��l�����l���B�m���������{����̖��ͨ����78��82 GHz��Ȼ�l��C�y���İl����̖������֪�l�ʣ����Բ�ͬ�l�ʷ��ص���̖�ĕr�g��ԓ�r�g���cͲ�}�еĴ�K���wˮƽ�����ȡ�����FMCW�����{���B�m��̖��������^���l�������ӞV���������O�ñ����^���l�����ø���Ч���Ķ��a������������̖��ɢ�b���w���Ȟ�±3mm��
���ڵ�FMCW���_ʹ�ð��F�ĽM�����c����TOF�O����ȣ��������ĸ���Ĺ��ʡ���ˣ�FMCW�H�����ľ��x���ܘ������^ȥ�����У��M���ăr���ѽ����Ͳ��ҹ��ĸ��ͣ�������F�ڿ����Ժ����ăr�����p��ϵ�y���\�С��о��ͬF���yԇ�C����FMCW�^�m��W���λ�26 GHz��
���}�_���_�У��l�����l�����}�_�������������_���y���ϕr���迹��׃�����������������䡣���������ȡ�Q�ڱ��y���ϵ�늽��|�������������r�g���º�������2���ǹ����ṩ���x�ı�����������̖�ķֱ��ʣ��}�_�^�m���^�͵��l�ʡ��鿴�u��ܛ���еķ�����̖������ע�26 GHz�}�_��Ԫ�ķ��ط�ֵ�c26 GHz FMCW�зdz����J�ķ��ط�ֵ��ȸ��ߡ�
���\����M�y��
��ز���ۙ���\��ȸ����ܴ����������_Һλ׃������
��ز���ۙ�R�e������̖�IJ�ͬ�������z�y�c��C���e��ȵ��e�`���e���������e�`��̖���״��{ԇˮƽ�x���r�������T�������o�B�؈D���@����ͨ�^��Ͳ�}��Ͳ�}�еĮaƷ����ɡ�Ȼ���o�B�؈D�ں��_�\�У���ز���ۙ̎���Y����̖��ӳ�����лز���̖ - ���f��̖������ϵK��ͻ������̖·���У��������a����������̖�������ԡ�
���\��ʹ�ø��㷨�Ԅ��u��26������ͬ���}���l�;������Ɉ�档���磬Endress + Hauser���������g�O�y���_�l�����Ƿ��������Ϸe�ۻ҉m�����u��������̖�ķ��ط��Ȼȡ��S���҉m�۷e��������̖׃��Խ��Խ�٣��S���r�g��������̖�Gʧ��
���磬�����ط���ƫ�x�O���İٷֱ�-10���r����������̖�Gʧ֮ǰ�ܾþ��|�l����ԓ�������ɰ���һ���_�P�����ڴ��_�՚ⴵ�߲��坍����ǰ�����e�ۻ҉m���@��������̖�Gʧ�Ͳ���Ҫ�ľS�o�L����
�A�y�y������һ��������;�����ǰl��C�K�˵�늚��B�ӡ�24 Vdc��Ԫ���Ծ���18������������Դ�����ԱO�y늉��Ƿ����ڸ��g���µ��ӻ�������ˮ�M������µļ�壬����“��Ҫ�S�o”��B����֪ͨ�ˆT����ȫ���ϰl��֮ǰ�z��׃����̎��늚�K�ˡ�
�����ǶȺ��l��
TOF��FMCW���g֮�g�^�õĵ��@���������Ӌ��ˮƽ���㷨����ˣ��x�����_ˮƽ�x��ȡ�Q�ڹ����Ƕȣ��l�ʼ����A�ڑ��� - �������ڃɷN��Ƽ��g֮�g�M��ʰȡ��
�����Ƕ� - �����_��̖�еĔUɢ�� - ȡ�Q���쾀�Ĵ�С�����_��̖���l�ʣ��D5�������磬23�ȵ��^��Uչ����6Ӣ��ĵ��l6 GHz���_�a���ġ��쾀��ֻ��3�ȵ��^С�Uչ���ɸ��l26 GHz���_��3Ӣ��a���ġ��쾀��
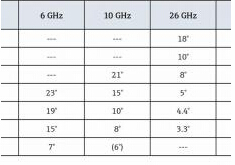
�D5�������Ƕȸ������_ҺλӋ��̖���l�ʺ��쾀�ߴ��׃����
�����ǶȺ���Ҫ��������Q�������_ҺλӋ�cͲ�}�ڵİ��b���x����������ԓ���_Ͳ�}�ڣ���������ɔ_���_��̖��Ӱ표ʴ_�ԺͿɿ��ԡ����磬�����д�����ǵ����_ҺλӋ���b��̫�����ȱڕr���@���������y������������Ǿ��Բ��ʴ_��
խ�����Ƕ�ʹ�x�������b�ڿ���Ͳ�}����λ�ã��D6�������ҿ��Ը������ҵ�һ��λ�ã���ԓλ������������Ͳ�}�е��ϵK�����ˮƽ�_�P�ͽ���֧�Ρ�

�D6��������r�£����_ҺλӋ���M���ܿ���Ͳ�}�ڰ��b�����]�������ǶȺͰ��b������Ŀ׳ߴ���ʩ�ӵ����ơ�
�쾀�ߴ����Ҫ��������Q����Ͳ�}픲�������_�ڳߴ硣���x�����b��Ͳ�}�ڸ��������^���ȵp�پS�o���g�ˆT��Ͳ�}픲������M�оS����Ҫ���Ķ��p�ٰ�ȫ�[����
�^���������ſ����gɢ�b���w�aƷ����ֹ����Ҫ�{�������ԃ���������̖�����{�Ƕ��^���B�����S���_����Ͳ�}�и���aƷ�ĽǶȡ�
26GHz FMCW�x���đ��ð�������С�^���B�ӵ�Ͳ�}��������^�ߵ��l���ṩ�^С�Ĺ����ǶȲ����Sʹ���^С���쾀�ߴ硣һ�_26GHz�ăx����������ͨ�^ȫ�����y��Uչ�����M�������
26GHz���_ҺλӋ�m�����L�_410Ӣ�ߵĜy�������������S���ϵK��đ��ã��ߴ�ļ��LͲ�}�͎��F�εײ���Ͳ�}����Ҳ�m����С�w���ߴ磨<0.17Ӣ�磩����鲨�LԽ�̣������Է�����w���ߴ�ԽС�����]���h�x���ȵĴ���ƫ�D���@�ٴκ���������Ч�ʵ�ӑՓ��ͨ�^�_������ͷ��ذl�������l����̖��Ч��Խ�ߣ��^�̜y����Խ�ɿ���
���������ڷ�ĩ��ɢ�b���w���õ��^�V��ʹ�õ����_ҺλӋ��26 GHz�}�_���_���@Щ�x��������450,000��N���ã������y���������_230Ӣ�ߣ��O�˻҉m���l�����Ϳղ�������Ҫ����푑����cFMCW��ȣ�26 GHz�}�_���_���и��ٵ���̖�V�����㷨̎�����Ɍ��F������D�Q�͌��^��׃����푑���
���Y
���������_ҺλӋ���^�m�����ڷ�ĩ��ɢ�b���w���õļ��g�������x�����_�ļ��g��ָ�����ܕr���С�ġ���횿��]Ͳ�}�ȵ����ȣ������͗l���������ϵK��҉m�͝��Ĵ��ڡ��c��Ϥ���п��Üy�����g�Č��Һ������Ԏ��������x���΄ղ���ÿ������ָ�����_���e�ăx����
- [��˾��] �ŷ���ҺλӋ�Мy��ä�^�� 2021-12-06
- [�ИI��] �׃����ԓ��ô�S�o 2021-11-29
- [�ИI��] ����ҺλӋ���B�rע����� 2021-11-25
- [��˾��] �����pɫҺλӋ�c�ŷ���ҺλӋ��ʲô�^�e 2021-11-16
- [��˾��] ��ɴŷ���ҺλӋ�ȸ����³��ij�Ҋԭ�� 2021-11-10
- [�ИI��] ������ҺλӋ�đ��� 2020-08-01
- [���g���}] ʯ�̓���Һλ�y���x�����_ҺλӋ��İ��b 2012-10-26
- [���g���}] ���_ҺλӋ���bҪ�� 2012-10-21
- [���g���}] ����ҺλӋ�ă��c����ϴ��ʽ 2012-10-20
- [���g���}] �����xُ�ߜظ߉��ʹŷ���ҺλӋ 2012-10-20